Sameus
Sameus tulkitaan satelliitti-instrumenttien havainnoista erityisesti Suomea ympäröiviltä merialueilta ja järviltä pilvettöminä aikoina. Kartoissa sameusvaihtelut on kuvattu värikartan avulla: kirkkaat vesialueet sinisellä värillä ja sameammilla alueilla väri vaihtuu keltaisesta punaiseen, erityisen sameilla alueilla violettiin. Taustakartta-aineisto näkyy niiltä alueilta, joissa on maata, pilviä, jäätä tai havainto puuttuu. Sameuskartoissa näkyy usein luontaista vaihtelua, kuten jokien rannikkovesiin tuoma maa-aines tai kovan tuulen aiheuttama resuspensio, joka nostaa pohjasta sameampaa vettä pintaan. Sameuskartoissa näkyykin usein erityisen hyvin jokien kautta rannikkovesiin laskeva sameampi vesi, erityisesti keväisin sulamisaikaan sekä sateiden jälkeen. Suomen järvet ovat sameuspitoisuuksiltaan hyvin erityyppisiä, joten kuvien värikarttaa kannattaa säätää (ohjeet), jos alueen vaihtelu ei näy oletusvärikartalla.
Sameustulkinta perustuu satelliitti-instrumentin havaitsemaan vesialueelta saatuun auringon säteilyn takaisinheijastukseen, joka on sameilla vesialueilla korkeampi kuin veden heijastus kirkkailla alueilla. Sameustulkinta tehdään mallilla, jonka laskenta perustuu neuroverkkoon (C2RCC , Brockmann et al. 2016, Doerffer, et al. 2007; 2008a; 2008b). Malli on eri muodoissaan käytössä useissa kansainvälisissä palveluissa, kuten Eumetsat ja OC-CCI, jotka tuottavat aineistoja maailman merialueille. Malli on avoimesti saatavilla SNAP-ohjelmiston kautta. Syken aineistoissa mallin lopputulos on kuitenkin sovitettu vastamaan tarkemmin Suomen rannikon ja järvialueiden optisia ominaisuuksia VESISEN-hankkeen aikana. Sovitus perustuu rannikolla järjestettyihin maastokampanjoihin ja ympäristöhallinnon asemanäytteenottoon (esim. Attila et al., 2013).
Tulkinnan tarkkuus on hyvä verrattuna seuranta-asemilta kerättyihin ja laboratorionäytteistä analysoituihin sameusnäytteisiin (alueesta ja vertailuaineistosta riippuen (r2 0.8-0.67), sivun alalaidassa esimerkkejä aineistovertailuista). Kun verrataan sameushavaintoja vesimuodostumatasolla, EO-sameushavainnot vastaavat hyvin asemilta tehtyjä havaintoja (r2 =0.76, RMSE=3.2 FNU, MAE= 1.4, N=286).
Tulkintaan on käytetty vuodesta 2016 lähtien tarkemman maastoerotuskyvyn EUn Copernicus-ohjelman Sentinel-2 -sarjan MSI-instrumentteja sekä NASAn Landsat-8/9 -satelliittien OLI/OLI2-instrumentin havaintoja. 60 m tarkkuudella tehty tulkinta voidaan ulottaa saaristoalueille ja rantojen läheisille alueille. Tarkan maastoerotuskyvyn aineistoista on hyötyä erityisesti järvialueilla. Tarkempia satelliittiaineistoja ei kuitenkaan havaita päivittäin koko rannikon alueelta, vaan havaintoja kertyy muutaman päivän välein. Aineistoja täydennetään vuoden 2020 aikana myös OLCI-instrumentin päivittäisillä, 300m maastoerotuskyvyn tulkinnoilla, jotka täydentävät aineistoa erityisesti avomerialueilta.
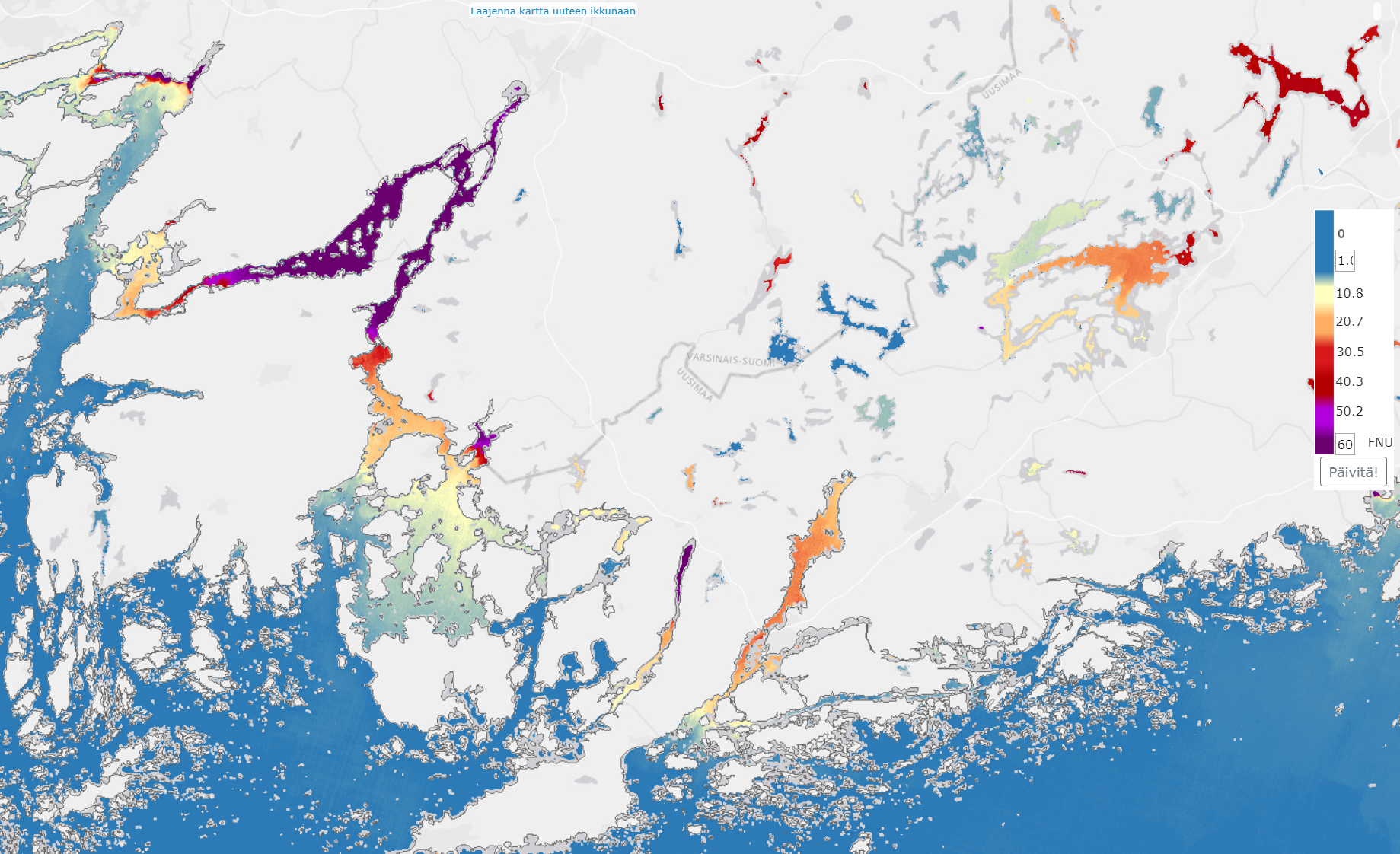
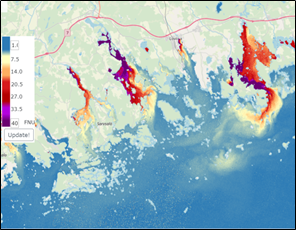
Esimerkki sameusaineistosta 07.04.2020, Sentinel-2 MSI ESA Copernicus Sentinel Data, SYKE.
Tarkkaan päivitetään myös vuosien 2003-2011 osalta ENVISAT MERIS-instrumentin 300 m maastoerotuskyvyn sameusaineistoja, jotka kattavat koko Itämeren alueen erityisesti avomerialueilta. MERIS ajanjakson sameustulkinta perustui aiempaan versioon bio-optisesta mallista (C2R, Doerffer, et al. 2007; 2008a; 2008b). Bio-optisen mallin laskentatulos on sovitettu Suomen rannikon optisia ominaisuuksia vastaavaksi (Attila et al., 2013).
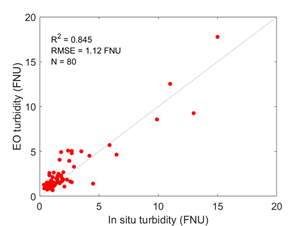
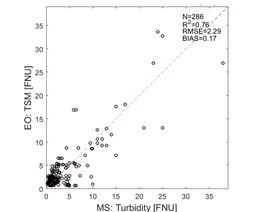
Sameushavaintojen tarkkuus Suomen rannikolla asemahavaintoihin verrattuna. EO-sameustulkinnan tarkkuus rannikolla ja järvillä.
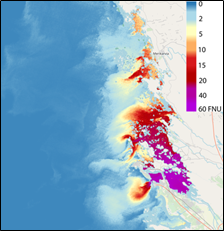
Esimerkkejä sameustuotteista rannikolla keväällä sulamisaikaan. Vasemmalla Kokemäenjoki ja sen pohjoispuolella olevat pienemmät jokisuut (14.4.2016), oikealla alueita Itäiseltä Suomenlahdelta (20.4.2019).
Viitteet
Attila, J., Koponen, S., Kallio, K., Lindfors, A., Kaitala, S., & Ylöstalo, P. (2013). MERIS Case II water processor comparison on coastal sites of the northern Baltic Sea, Remote Sensing of Environment, 128, 138–149.
Brockmann, C & Doerffer, R. (2016). Evolution of the C2RCC neural network for Sentinel 2 and 3 for the retrieval of ocean colour products in normal and extreme optically complex waters. Proc. Living Planet Symposium, ESA SP-470.
Doerffer, R. & Schiller, H. (2007). The MERIS Case 2 algorithm. International Journal of Remote Sensing, 28 (3–4), 517–535. doi:10.1080/01431160600821127.
Doerffer, R., & Schiller, H. (2008a). MERIS Regional Coastal and Lake Case 2 Water Project Atmospheric correction ATBD (Algorithm Theoretical Basis Document) 1.0. 41 p. pdf http://www.brockmann-consult.de/beam-wiki/display/LAKES/ATBDs?preview=/1900548/8454150/meris_c2r_atbd_atmo_20080609_2.pdf
Doerffer, R. & Schiller, H., (2008b). MERIS Lake Water Project - Lake Water Algorithm for BEAM, ATBD (Algorithm Theoretical Basis Document) 1.0, 17 p.